Interviewer & Japanese Writer: Yamamoto Takaya; Translation & Editing: Matthew Cherry
Hiroshi Maeda was selected for the 2021 INNO-vation Program’s Disruptive Challenge thanks to his work on developing a legged robot that could walk like a real person.
Although walking may seem quite simple, people use their entire bodies to perform this action, combining extremely complex movements in order to maintain balance. Finding a way to translate this type of movement directly into a robot is nigh impossible. In order to combat this seemingly insurmountable task, Maeda started changing his way of thinking.
“People just have superior shock absorption capabilities thanks to our skeletal structures, so trying to apply a direct copy of that system into robots is egregiously difficult. So I changed my approach from copying what people have to making a structure that could only be implemented into robots, giving them abilities that humans wouldn’t be able to replicate,” Maeda said.
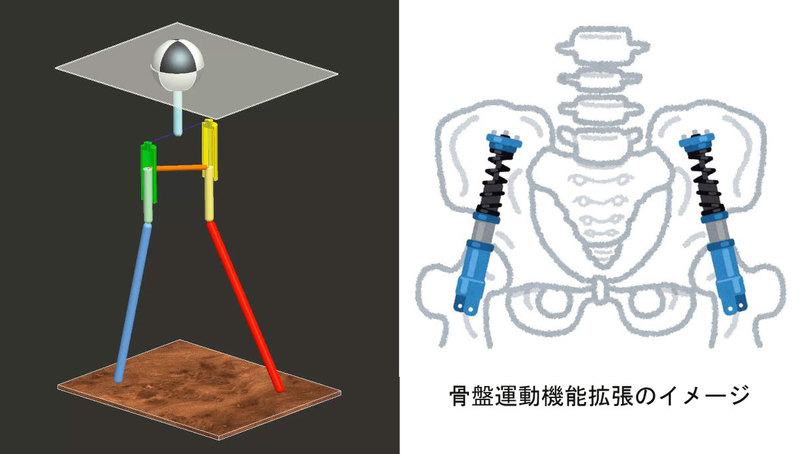
Maeda devised a new attack plan: expanding the movement capabilities of robotic pelvises. He would do this by adding a mechanism much like a car’s suspension directly into the pelvic controls. This would not only allow robots to absorb ground impact in their legs, but also allow them to stand up with their knees extended and adjust their center of gravity.
Upgrades to the robotic pelvis let mechanical legs absorb impact.
“It’s like they can grow taller now,” Maeda explained. “Around 10% of a person’s height is accounted for by their feet. Since this mechanism lets robots have a wider degree of independent vertical movement in both legs, it can absorb quite a bit of impact on one or two legs, even without relying on bending the knees. Robots can also use it to make themselves taller without standing on their tiptoes. It really adds new functionality that’s truly unique to robots.”
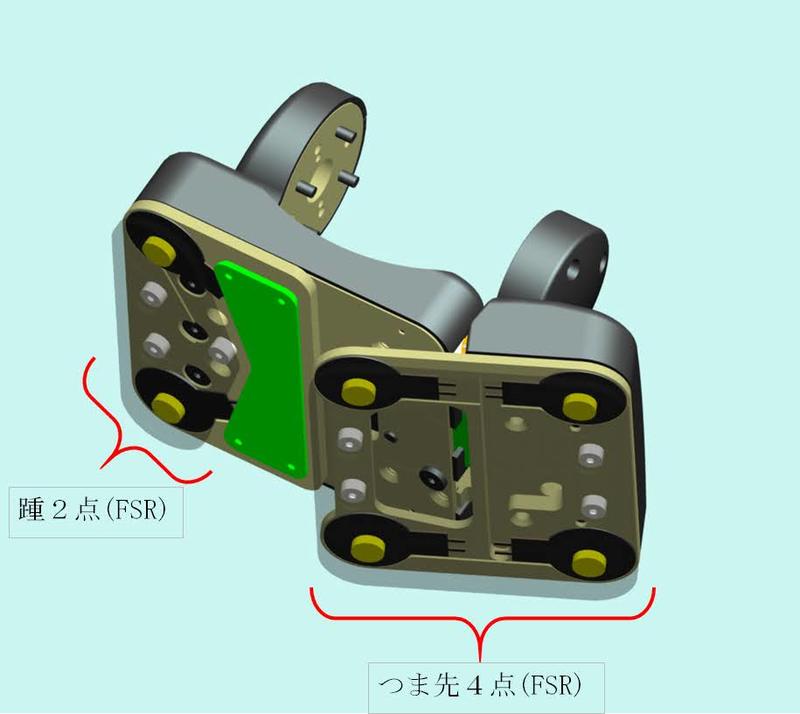
In addition, the toes have been equipped with a passive joint, allowing the heel to rise up in accordance with shifts in the center of gravity. This lets robots learn how to move about correctly on the ground they’re standing on.
The feet consist of two large parts, including the pressure sensor-equipped toes.
The inner workings of the toes.
After testing these new feet out, Maeda discovered that he could make robots walk in a much smoother manner, unlike the clunky movements of conventional robots. Despite this, a problem still remained.
Actual test footage of the experimental robot “FC”.
“The problem is space. I’ve prioritized the functionality of the movements and made some compromises on the outward appearance, so I’ve only been able to make it as small as a human torso. In order to incorporate this technology into robots of all different proportions, I need to make them much smaller. But the smaller the robot, the harder it becomes to keep it rigid. That’s currently the most difficult part,” Maeda explained.
Even though changing the tech to adapt to various sizes of robots was still proving to be a challenge, Maeda was able to make them walk more smoothly during his development period within the INNO-vation Program.
In Part 3, we’ll speak with Maeda about his work after the INNO-vation Program.