Interviewer & Japanese Writer: Yamamoto Takaya; Translation & Editing: Matthew Cherry
It’s not a stretch to say that pilotable, lifelike robots have been one of humanity’s dreams for a while now. Hiroshi Maeda, selected for the 2021 INNO-vation Program’s Disruptive Challenge, is hoping to bring that dream a little closer to reality through his work by creating a robot that can move and walk just like humans do.
It’s been about 15 years since Maeda started his research and development on creating this legged robot. His initial inspiration came from building plastic models commonly referred to as gunpla. These models are based on the anime series Mobile Suit Gundam.
“I remember when I got a 1:100 scale gunpla. It was very small, only about 180mm tall, and I remember thinking I wanted it to move just like it did in the anime. That was the start of everything,” Maeda said, reflecting on the beginnings of his research.
Near the start of his research, Maeda modified this gunpla to move in a realistic manner.
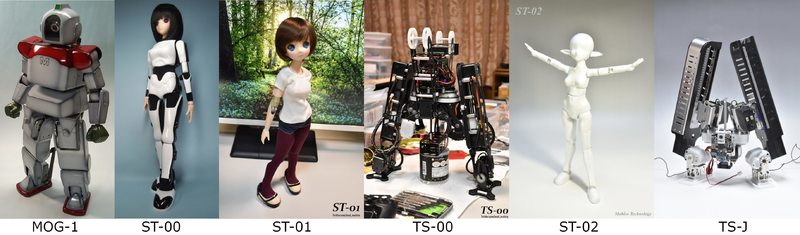
Various miniature two-legged robots Maeda created from 2013 to 2021.
Maeda was making progress in his research into producing more lifelike movements, but the biggest problem he encountered was balance. People use their entire bodies in complex ways to maintain balance, which can be very difficult to replicate in robots.
“Because humans have skeletal structures, they’ve got certain areas they’re just better at dealing with than robots, particularly when it comes to impact and shock absorption. For example, when we put our feet on the ground, our soles, ankles, knees, and lower back all work together in a complex manner to absorb the impact on our legs. Replicating the same type of structure is incredibly difficult when it comes to robots,” Maeda explained.
Maeda’s robots are made with original parts, cut out based on CAD data.
Recreating natural movement in robots has quite a history of running into the same balance problem throughout the past few decades. Honda’s legged robot Asimo took the world by storm when it was first shown off in 2000, but even it had trouble maintaining balance. Indeed, the robot would have difficulty shifting balance on a vertical plane, choosing instead to focus completely on maintaining horizontal balance, thus leaving its knees in a continuously bent position.
“In a way this made the robot look even more robotic than before, like it was walking in the snow constantly trying not to slip and fall by keeping its back lowered. From the viewer’s perspective, it’s not a pretty sight at all. Seeing this made me want to make robots move like they do in anime even more,” Maeda said, offering his insights. “The gap between a robot’s mobility and how it looks while it’s moving is still too large. No matter how cool modern-day robots look, they’re still awkward and clumsy as soon as they need to move. Even robots made to look like young ladies end up moving around like old men. I’d like to solve this problem.”
In part 2, we’ll ask Maeda directly about his time in the INNO-vation Program.