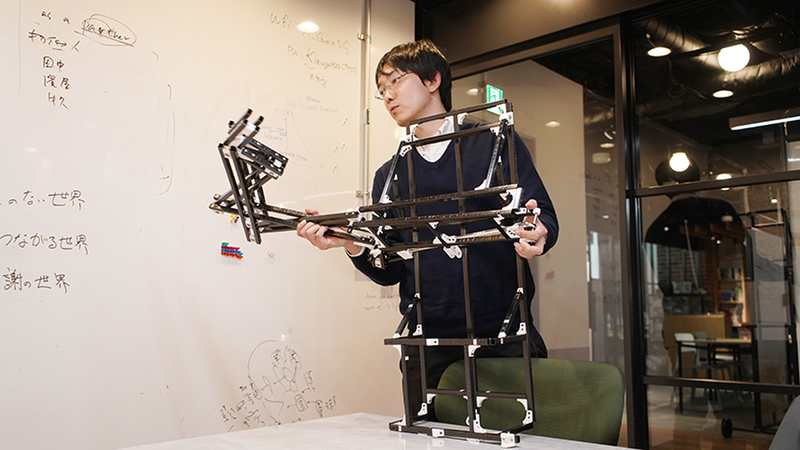
開発中の卓球ロボットと田中氏
古武術の技を再現する
田中が最初に作ったスポーツロボットは、古武術の技を再現するものだった。古武術には様々な身体操法があり、中には「まるで力を入れていないのに相手を倒す」といったアメイジングな技がある。
修士課程で田中が所属していた研究室(東京大学・國吉新山研究室)の先輩、尾形邦裕(現在産業技術総合研究所)は古武術の身体操法をモーションキャプチャを使って計測、科学的に解析してみることにした。技の原理が解明できるのではないか、それをロボットの設計や制御に活用できるのではないかと考えたからだ。
研究室では古武術の達人である甲野善紀氏の協力を得て、氏の技の1つ「押し動作」を解析することになった。これは、両手で押してくる相手を握りこぶしを作った片腕だけで押し返し、後退させる技である。
計測と解析の結果、「押し動作」のヒミツは、1) 前方への身体が回転する勢いを利用、2) 拮抗する指伸筋と指屈筋を賦活(ふかつ)させて肘の剛性を高め、3) 予期せぬタイミングで予想外の方向に押すことで、相手を後退させていることがわかった。
田中は、そのコツを、12本の空気圧人工筋で動く関節を備えた「筋骨格ロボット」に埋め込んだ。動画でどんな動きなのかと観てみると、たしかに台座に固定された金属アームのひとはらいに、生身の人間がよろりと後退してしまう。「なにこれ?」となるシュールな光景だ。【https://note.com/sports_robot/n/n1842ccdafc14?creator_urlname=sports_robot】
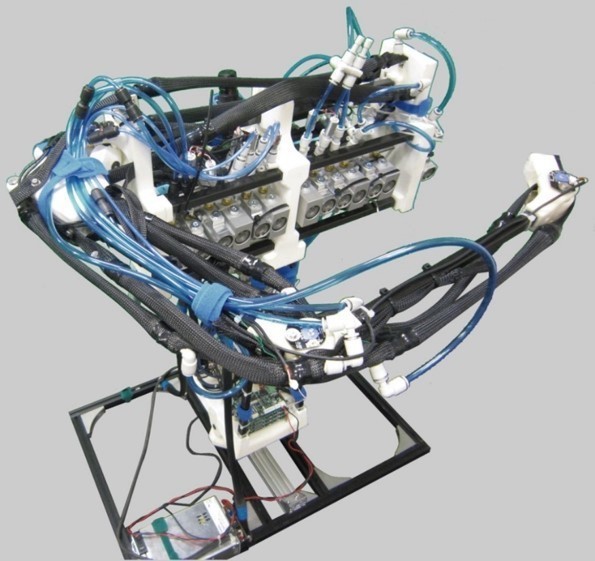
ロボットには右腕と体幹と腰があり、台座に固定され、人間と同程度の大きさと重さがあり、腰と肩と肘と手首の関節がある。
© 2012 Intelligent Systems and Informatics Laboratory
「達人が生み出す巧みな技も、科学して再現可能なんです。研究の中では、身体の“構え”が重要だとの話も出てきました。僕は次に、構えて動く動作を研究をすることにして、今度は全身でボールに飛びつく『レシーブロボット』を作ったんです」
人間とロボットが共にスポーツを楽しむために
ヒト型のレシーブロボットは、連続して跳躍と打撃を行う。作りながら気づいたのは、「様々な状況に素早く対応できるロボットがほとんどない」ことだった。同じ動作を速い動きで繰り返すロボットはたくさんあるのだけれど。どこにボールが来ても速い動きで飛びついて状況に対応、最適な科学的動作で動くロボットを作れないものだろうか…。
レシーブロボットの先に待ち構えていたのが、現在開発中の「卓球ロボット」となる。スポーツロボットとして卓球ロボットは1980年代から開発されているが、これは卓球が1対1の対戦ゲームで、ボールが軽く、扱いやすいからだ。
卓球のスイングを研究し、開発したロボット。
田中も、「卓球限定」のロボットを開発しているわけではない。スポーツ全般への応用を視野に入れて開発している。
「人間を喜ばせるロボットが作りたいんです。人とロボットがいっしょになって“阿吽の呼吸”で動き回る、そんなロボットが目標。“人馬一体ロボット”と言ってもいいかな。人間とロボットが共にスポーツを楽しむ状況を作りたいと思って、やっています」
「ロボット開発の歴史を辿ってみても、コミュニケーションは『対話』なんですよね。文章や言葉で対話させてテキストを吐き出させる、みたいな。身体の感覚や複雑な運動の動作といった非言語コミュニケーションから人を理解して、ロボットを作っていくことが重要だと思っています。そんな記号創発/認知発達ロボティクスを目指す中で実現したいと思っているのが、卓球ロボットを取っかかりにしたスポーツロボットなんですよ」
スポーツはゲームだから、読み合いや駆け引きがある。場面場面では、無秩序にしか見えない相手の動きがあって次の展開を予測できないことがよくあるが、それでもプレイヤーは何かを直感、相手のプレイを予想、自身の動作を選択・判断して、素早い運動を繰り返していく。
「相手の動きの予測は、研究の中でできるようになってきています。過去の運動情報を使い、抽象化したボーンで見せたりして、確率統計から動きを予想させるようにしています。難しいと考えていた行動予測が少しずつできるようになっていて、かなり面白いです」
卓球ロボットは田中氏が所属するオムロンですでに開発されている。彼が求めているのはロボットの動きが人間に対して意味をもつことだ。
スポーツには、上手な人が身につけているテクニックもある。
一流アスリートを開発する
「例えばフェイント。スイングは一定のパターンなんですけど、肩が動くタイミング、腕を振るタイミング、腰を回すタイミングなどをちょっとずらしてやることで、相手の予想とは反対方向にボールが飛んでいき、フェイントになります。スポーツ科学で解明されてきている運動のコツみたいなものを見聞きすることからもいろんな着想を得て、ロボット用に作っています」

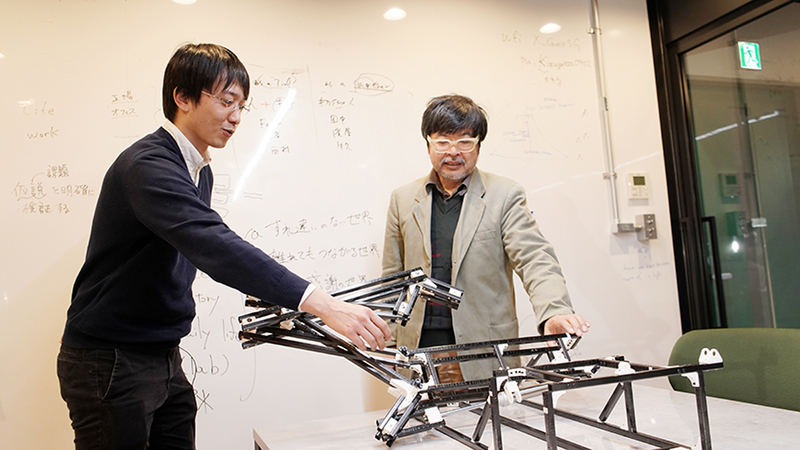
ロボットは思いのほかシンプルだ。カーボンファイバー製のフレームに動作用のシリンダがついている。
ロボットがプロのテクニックを見せてくれたなら、その動きをお手本にアマチュアだってすんなり上達できたりしそう。
「ゴルフの達人のショットをロボットが目の前で実演してくれて、その通りに打ったらなぜかその人もうまいこと打ててしまう――そんなことができる気がするんですよ」
田中が開発するスポーツロボットは、一流アスリートのパフォーマンスを再現するものではない。スポーツを一緒に楽しめる、よき“仲間”になるのである。
それは「練習相手」であり、「トレーナー」であり、「チームメイト」であり、時には自分の代わりにバーチャルにスポーツをプレイしてくれる「変わり身」にもなる。人間の身体や行動を理解するための「道具」にもなるはずだ、と田中は言う。
「ヒト型での開発も必須です」。人間の側がロボットの表情や動きを察知できないと、プレイを楽しめないから。
今後の目標
スポーツ動作を行う機械系と制御系、人間の運動を予測する認識系、人間に運動を予測させる行為系と、それぞれに検討課題は少なくない。各機能を統合して人間とやり取りするプラットフォーム作りと、高速動作するヒト型の実現は、直近の重い課題にもなっている。
それでも田中は、早くみんなに使ってもらいたい。
「人間と同じ体格で一緒にプレイするのが最終目標ですが、おもちゃっぽい、小型の卓球ロボットも作ります。それを1万円くらいで、世界中で売りたい。これ、4年以内の目標です」
田中は、オムロンの関連会社、オムロンサイニックエックスの社員。ふだんは工業用組み立てロボットのAI化などを担当している。スポーツロボットは「20%ルール」で行う、自分プロジェクトだ。実業に役立つロボットは会社の仕事でがっちりと、楽しさを追求するスポーツロボットは「20%」でどんどんと。開発の棲み分けをしている。
卓球ロボットの計画では、わずかな差で負けてイイ気分にさせてくれる「接待ピンポン」機能を追加する予定も、この数年のうちにある。
「弱すぎず、強すぎず、ほどよく“手加減”をするロボット、ですね。単純に動作を遅くするだけではいい感じの手加減にならないはず。まずは手加減とは何かを解き明かしてからになりそうです」
「忖度してよ~」「気持ちをわかれ~」と、手なづけられるロボットが、未来の家にはやって来るのでしょうか? それ、われわれの最高の相棒になるでしょう!
ロボットを通じて人が繋がる。そのための第一歩がスポーツロボット。
プロフィール
田中一敏(たなか・かずとし)
スポーツロボット研究者。1987年熊本県生まれ。2017年東京大学大学院情報理工学系研究科博士課程修了。オムロンサイニックエックス主任研究員。2018年日本ロボット学会研究奨励賞。
関連URL:
https://www.youtube.com/watch?v=AHWflhBlX9A
https://www.youtube.com/watch?v=n2xblK9Lz_A
https://researchmap.jp/kazutoshi.tanaka
https://note.com/sports_robot


