
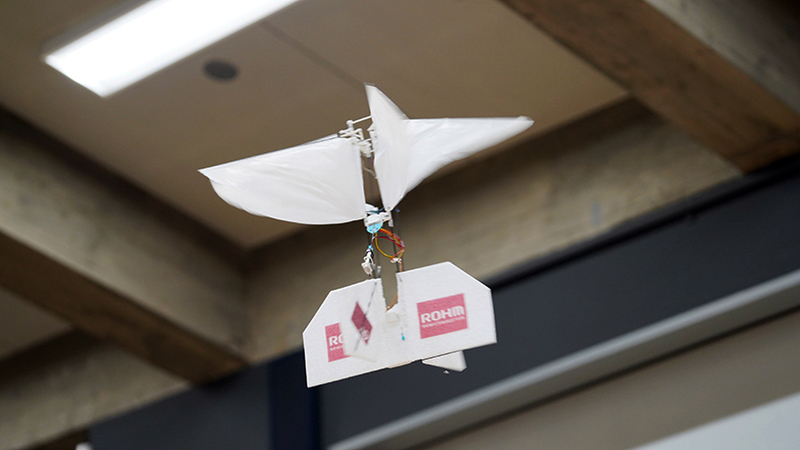
自身が研究開発中の羽ばたき型飛翔ロボットを手にした渡邉氏。
白い4枚羽(左右2枚ずつ)がパタパタと動くと、機体がスーッと浮き上がっていく。舞い上がると羽がさらに激しくパタパタ、水平飛行でスイスイと飛び回る。空中で停止してさかんに羽を動かし、ホバリングする姿はどこか愛らしい。
The WiFly
「虫でもない鳥でもない、こんなロボットがたくさん飛び回る様子をみなさんに見てもらいたいんですよね。2020年の東京オリンピックには間に合わなかったけれど、2025年の大阪万博までには実現したいです」
この飛翔ロボット『WiFly(Waseda Intelligent Fly)』は現在、4枚羽で2つのモーターを搭載、飛行高度や空中姿勢の角度を機械学習で自動制御できる『WiFly2』に進化。完全な自律飛行の実現に向かっての取り組みが続けられている。
このように羽ばたきながら飛ぶ「羽ばたき飛行機(オーニソプター)」は、それこそレオナルド・ダ・ヴィンチの頃から設計されてきているもので、機体や機構そのものが珍しいわけではない。紙飛行機のように愛好家も多く、時には子ども向けのワークショップも開催されるくらいにポピュラーでもある。
渡邉研究室の飛翔体ロボットの特徴は水平の羽ばたきから垂直にホバリングする体勢に移れることにある。
このプロジェクトのユニークさは、渡邉が「羽ばたき」に着目したきっかけ、そこにある。なにせ主宰する渡邉研究室は、半導体工学、それもシリコンの物性や界面加工といった基礎研究を専門にする研究室なのだ。
「メインの研究からはかけ離れています。『なぜこれを』と質問されることは非常に多いですね(笑)。もちろん、余技でやっているわけではないんですよ」
渡邉が飛翔ロボットのアイデアを練り始めたのは、2008年のこと。当時、すでに国内の半導体産業は海外に流れ始め、技術進歩にも生産規模にも行き詰まりが見え始めていた。
「半導体市場は大量生産、大量消費で形成される市場です。未来に半導体が大量消費され続ける市場はどこにできるだろうかと考えた時、『ばらまき型センサー』に可能性があると私は考えました」
ばらまき型センサーの問題点は、電源にある。バッテリーの制約を受けない「多点センシング」、多数のセンサーが自ら移動してデータを取ってくるシステムはできないだろうか。例えば、“情報のミツバチ”が飛んで行き、エネルギーが切れたら基地局に戻って充電して、また情報を取りに飛ぶ——そんなイメージのシステムだ。
飛翔体ロボットの群れ
2006年には、コンピューター将棋のプログラム「Bonanza(ボナンザ)」が注目を集めた。あの時、最適制御理論アルゴリズムを使えば遠からず人工知能が実現される日が来そうだと考えたことを、渡邉は思い出した。
「人工知能でないと制御が難しいアプリケーションに、長期的に取り組んでいきたいと考えたんです。虫や鳥のような小型の飛翔体が開発できたら、そこにセンサー、メモリー、LSIを載せて、緻密な密度でセンシングするために何千、何万と飛ばせる。屋外を飛ぶのでそれは消耗品になるだろうし、膨大な半導体の新しい需要が生まれます」
山や田畑の上空、ビルのすき間を自由に飛び回る、何千、何万もの飛翔体ロボットの群れ。そんな「群知能(スウォームインテリジェンス )」が活躍する未来を10年以上前に夢想したところから、渡邉研究室のチャレンジは始まった。
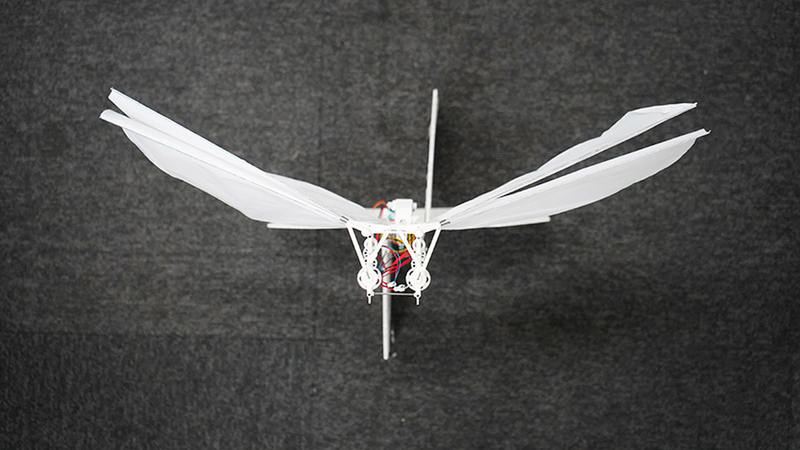
飛翔体ロボット正面から見たところ。

上面より。全長320ミリ、翼幅は220ミリ、重量は35グラム。
「最初は『羽ばたき飛行』の知識は皆無でした。トンボみたいなものを作りたくて。けれど、トンボは羽をひねって飛ぶんですね。ただ羽ばたいてるわけじゃない。そんな複雑な機構を再現しようとすると、重量が増えるだけでうまくいかないんです。」
ドローン(当時はクアッドコプター)も登場し始めていた。ドローンからの応用も考慮したが、ドローンは滑空ができない。プロペラを回し続けるので、バッテリーと航続距離の面でやはり「羽ばたき」に分がある。
開発プロセス
試行錯誤のうちに、5年が経っていた。モーター駆動系、フィードバック制御、垂直離着陸と水平飛行のための機構(後に独自開発の「重心移動機構」になる)など、手がけることや検討課題はいくらでもあった。が、肝心の機体の完成度をなかなか上げられない。
転機があったのは、2016年。この分野の研究家として知られる「超小型飛行体研究所」の宗像俊龍氏との協働が実現したのである。
「宗像さんからは『とにかく軽くしよう』とアドバイスをもらいました。また、モーターのトルクを調節するギアボックス、羽を動かすクランクを提供いただきました。それに我々のオリジナル技術『重心移動機構』を実現させて、初代の『WiFly』ができたんです」

羽ばたき機構を提供してもらって研究が前に進んだ。
TV番組で紹介されるなどして、『WiFly』は飛行を披露する機会が増えていった。新しい飛び方をする飛翔ロボットができたからには、次は人工知能の応用である。
「機械学習は、ある程度の高さなら報酬を与え、外れたら報酬を与えないという強化学習で、高度が自動調整できるようになっています。空中姿勢の角度の調整にはモーターを重りに使っていまして、角度の維持に強化学習を使っています。これは場面場面で最適値が変化するはずなので、今後は階層を増やしてさらにディープに学習させていこうとしているところです」
その先にあるのは、完全な自律飛行。林の中、木立をスイスイと回り込みながら飛んだり、多数の機体が互いをよけながら群れて飛ぶことができるようになっていく。その時には機体のデザインもAI設計で人間のイマジネーションを超越したものとなっているか、いないか…。
『WiFly2』の重量は、今でもたった30gだ。こんなに軽いのに羽を交互に羽ばたかせるためにモーターを2個搭載しているから、ペイロード(積載可能重量)はまだ6gある。超小型カメラを積み、環境地図作成をSLAM技術で試みる日は、もう、すぐそこだ。
渡邉は、夢の続きをこう語る。
今後のビジョン
「車が渋滞している時、前方が見えたらいいなと思うこと、ありますよね? 高速道路のSAに入った時、上空から駐車スペースの空きが見えたらいいと思いませんか? 車の屋根がパカッと開いて、飛翔ロボットがぐるりと見てきてくれたらいいんだけど」
サルやイノシシの被害に困っている農家やゴルフ場からは、追いはらうために飛翔ロボットを使いたいという声が聞かれるそうだ。土砂崩れや台風、大火災といった災害被害の状況把握にも、役立つという。羽ばたく飛翔体はドローンに比べて気流の乱れに強いためと期待されるので、より役立つ可能性が高い。
「事前予測にも使えるんじゃないでしょうか。例えば、地震。大地震があると必ず『予兆的現象があった』と言われるけれど、どれもサンプリング数が少ないノイジーなデータでしかない。だけど、何十万、何百万の単位で観測できたなら、地球規模の多点センシングが可能になったら、今まで人間が察知できなかった現象がわかるかもしれないです」
虫や鳥のように、“情報のミツバチ”がベランダや庭先にふっと舞い降りて、環境データをついばむ。そんな未来の日常風景を、渡邉は想っている。
プロフィール
渡邉孝信 (わたなべ・たかのぶ)
1972年、静岡県生まれ。1999年 早稲田大学大学理工学研究科電子情報通信学専攻博士課程修了。博士(工学)取得。日本学術振興会特別研究員、早稲田大学講師、准教授を経て、2012年より現職。専門分野は、電子材料工学、計算科学。
HP:https://www.watanabe-lab.jp/



